Variables DH para UR5e
El robot UR5e de Universal Robots tiene 6 grados de libertad (DOF), lo que le permite una gran flexibilidad y capacidad de movimiento en el espacio tridimensional. A continuación se detallan algunas de sus características técnicas principales:
- Carga útil: Hasta 5 kg
- Alcance: 850 mm
- Repetibilidad: ± 0.03 mm
- Peso: 20.6 kg
- Sistema de control: Polyscope, una interfaz de usuario intuitiva y fácil de usar
- Fuente de alimentación: 100-240 VAC, 50-60 Hz
- Consumo de energía: Aproximadamente 350 W en operación típica
Estas características hacen del UR5e una opción ideal para aplicaciones de automatización en diversas industrias, incluyendo la manufactura, ensamblaje, y manipulación de materiales. A continuación se muestra la ubicación de los diferentes marcos de referencia.
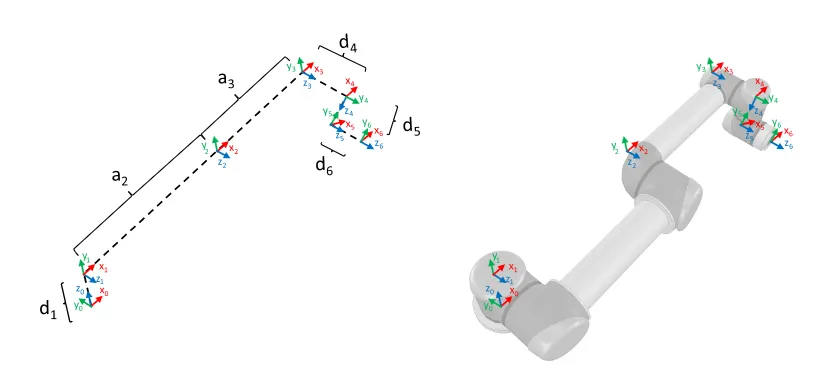
A continuación se muestran los parámetros Denavit-Hartenberg del robot UR5e:
| (rad) | (mm) | (mm) | ||
|---|---|---|---|---|
| 1 | ||||
| 2 | ||||
| 3 | ||||
| 4 | ||||
| 5 | ||||
| 6 |