Representación de robots
Los robots y sus articulaciones se pueden representar mediante diagramas que utilizan pares de rotación y translación. Estos diagramas son útiles para visualizar y analizar el movimiento y la configuración de un robot.
-
Pares de Rotación representan articulaciones que permiten el movimiento angular alrededor de un eje fijo. En los diagramas, estas articulaciones se suelen representar con un símbolo de arco o un círculo que indica el eje de rotación.
-
Pares de Translación representan articulaciones que permiten el movimiento lineal a lo largo de un eje. En los diagramas, estas articulaciones se suelen representar con una línea recta o una flecha que indica la dirección del movimiento.
Representación esquematica
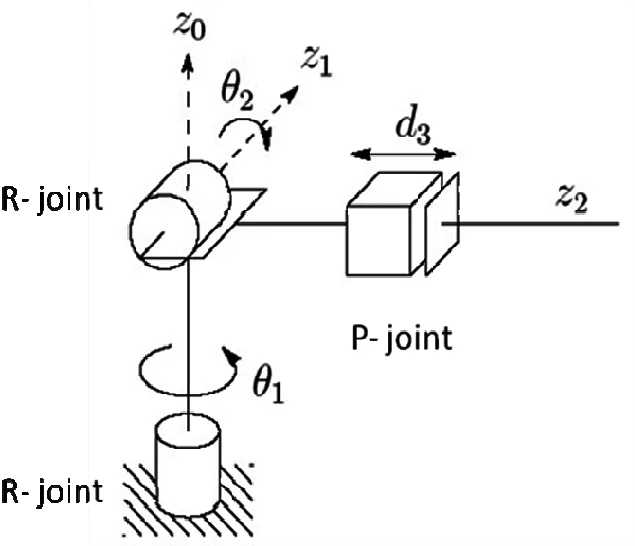
Sección titulada «Representación esquematica»Estos diagramas ayudan a entender cómo se mueven las diferentes partes de un robot y cómo interactúan entre sí. A continuación se muestran ejemplos visuales de estas representaciones:
- Representación esquematica #1:
- Representación esquematica #2:
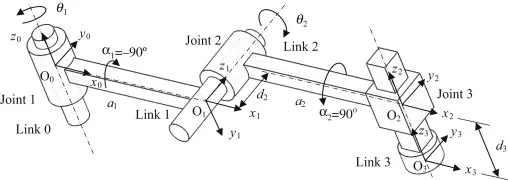
- Representación esquematica #1 reconstruida: