Clase 04
Cinemática de un Robot¶
¿Qué es la cinématica?¶
La cinemática es la rama de la mecánica que estudia el movimiento de los cuerpos sin considerar las fuerzas que lo causan.
Veremos¶
- Cadena cinématica
- Método Denavit-Hartenberg
- Cinemática directa
- Cinemática inversa
Cadena cinématica¶
¿Qué crees que es la cadena cinématica?
"Un robot industrial se puede considerar como una cadena cinemática formada por varias partes unidas por articulaciones. Puedes considerar la base del robot como sistema de referencia fijo y gracias a esto puedes conocer la posición y orientación de cada parte del robot con respecto a dicho sistema de referencia" (BARRIENTOS, A., 2007)
Representación de la cadena¶
La cadena cinématica tiene diferentes formas de representación. En general las representaciones tienen en común que:
- El par rotación se representa por circulos o cilindros.
- El par translación se represente por cuadrados o cubos.
Ejemplo del scara¶
Tenemos en la siguiente imagen el robot EPSON SRR-H803N:
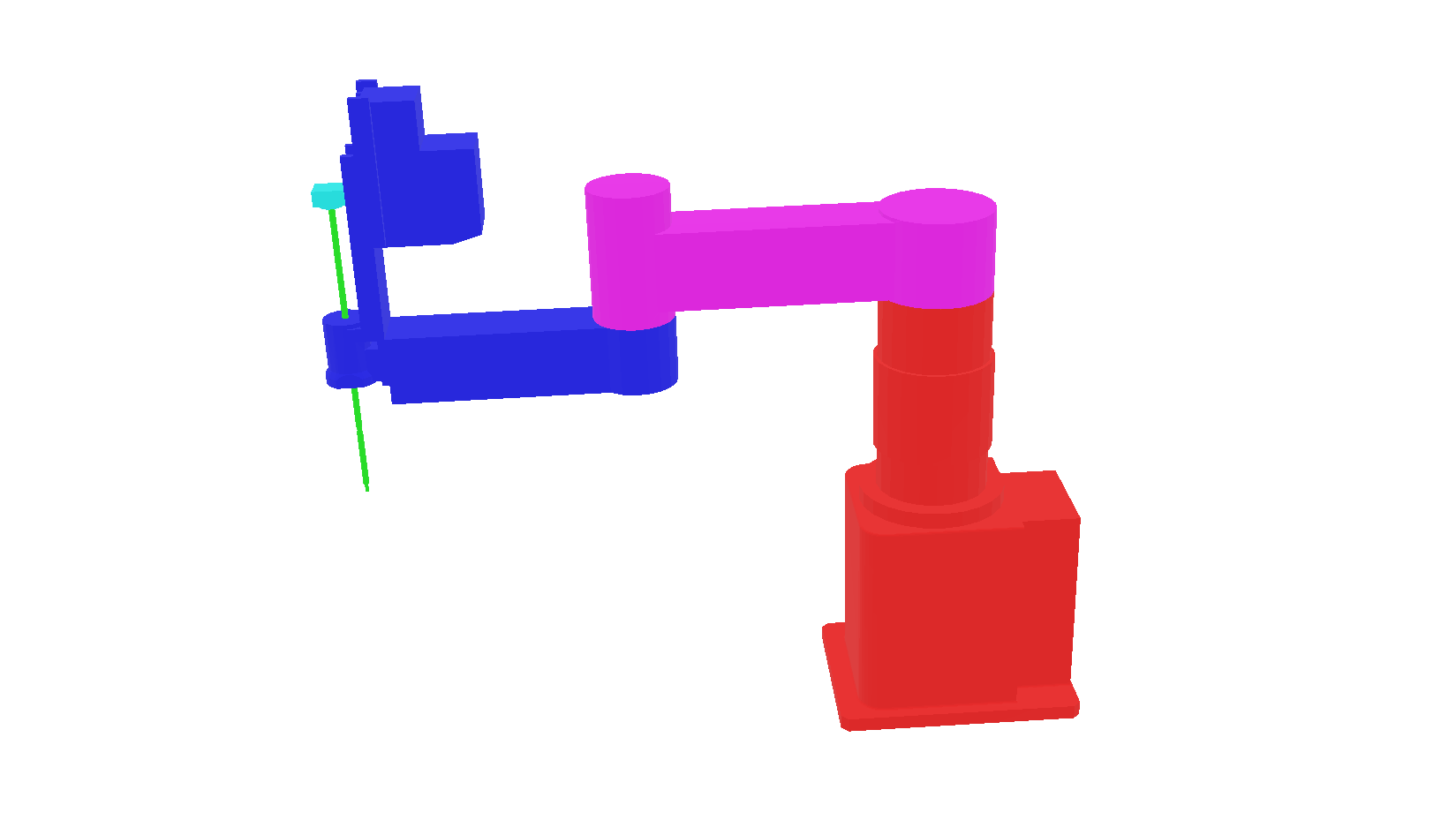
¿Cómo sería la cadena cinématica?
eslabón 0 -(rotación)- eslabón 1 -(rotación)- eslabón 2 -(translación)- eslabón 3 -(rotación)- eslabón 4
Ejemplo del scara¶
A continuación tenemos un ejemplo de un esquematico 2.5D del robot EPSON SSR-H803N:

Método Denavit-Hartenberg¶
Es una forma sistematica de describir la cadena cinemática del robot. Sigamos las reglas este enlace
Cinemática directa e inversa¶

Cinemática directa¶
La cinemática directa se encuentra usando el algoritmo de Denavit-Hartenberg. Ejemplos:
- Robot 2GDL
- Robot 3GDL
- Robot 4GDL
Cinemática inversa¶
Para el calculo de la cinemática inversa existen dos métodos principales:
- Método geometrico
- Método usando las matrices de transformación homogeneas
Para los robots de más de 3 grados de libertad, se usa el método de desacople de GDL
- Los 3 primeros grados de libertad definen la posición del objeto en el efector final
- Los demas GDL en general de 1 a 3 definen la orientación del objeto en el efector final.
Ejemplos de cinemática inversa¶
Haremos la cinemática inversa para los siguientes robots:
- Robot 2GDL
- Robot 3GDL
- Robot 4GDL
Desacople cinemático¶
Las tres primeras coordenadas son para poder posicionar el extremo del robot, mientras que las tres últimas coordenadas sirven para orientar el extremo del robot.
Las tres últimas coordenadas son aquellas que se cortan en un punto; esto se denomina “muñeca del robot”.